IncOder™ CORE Encoders
Miniature PCB-Based Inductive Encoders for Robotic Joints
IncOder™ CORE Encoders are compact, non-contact absolute rotary encoders designed specifically for integration into robotic joints and compact rotary actuators. Each encoder is built around a lightweight PCB-based inductive architecture that delivers highly repeatable, temperature-stable position feedback in demanding environments.
Robust Non-Contact Inductive Sensing
The encoder uses a proven inductive measurement technique that is inherently resistant to contamination, shock, and vibration. The hollow-bore design allows easy routing of cables, shafts, or mechanical elements through the centre, making it ideal for space‑constrained electromechanical assemblies.
Simple, Reliable Installation
The rotor and stator pair mount directly into the host assembly using standard M2 mounting holes. With modest installation tolerances, a programmable zero set point, and no calibration required, the encoder can be installed quickly and consistently during OEM production.
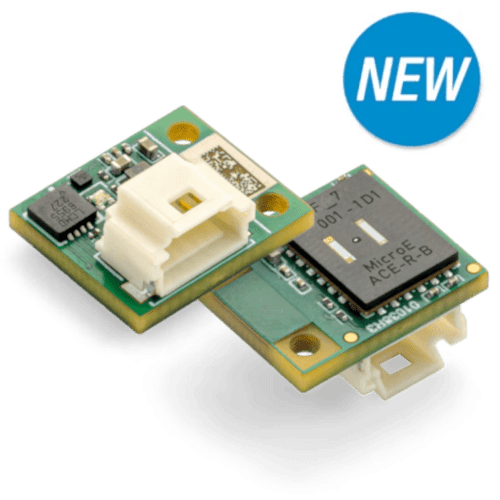
Integrated Electronics and Flexible Connectivity
Each encoder includes a passive rotor target and an active stator containing all processing electronics in a stacked PCB package. The stator uses a 10‑way Molex PicoClasp connector for power and data output and is available with either axial or radial connector orientation. IncOder CORE supports up to 20‑bit absolute position output across multiple digital protocols including SPI, BiSS‑C, and SSI.
Features
- Compact, lightweight PCB construction
- No precision installation tolerances
- No calibration required
- Ergonomic hollow‑bore design
- Highly repeatable position feedback
- Insensitive to contamination
Benefits
- Reduced system weight and design envelope
- Simple, fast installation
- Lower OEM production time and cost
- Optimised for integration into rotary actuators
- Reliable feedback in demanding environments
- Robust, stable position measurement
Specifications
| System Data | 44mm | 70mm |
|---|---|---|
| Rotor OD (Screw hole PCD) | 35.6 mm (36 mm) | 65 mm (36.6 mm) |
| Stator OD (Screw hole PCD) | 44 mm (56.8 mm) | 68.8 mm (75 mm) |
| ID | 10.4 mm | 30.3 mm |
| Height | 12.1 mm | 13.4 mm |
| Installation | 0.5 ± 0.2 mm gap 0.2 mm max radial offset |
1.1 ± 0.35 mm gap 0.25 mm max radial offset |
| Comms Protocols | RS422 compatible; supports SSI, SPI, BiSS‑C, ASI | RS422 compatible; supports SSI, SPI, BiSS‑C, ASI |
| Resolution | 10–17 bits | 10–20 bits |
| Accuracy | ±360″ | ±125″ |
| Repeatability | ±1 LSB | ±1 LSB |
| Max Speed | 10,000 rpm | 10,000 rpm |
| Supply Voltage | 4.5–5.5 VDC, 8–12 VDC | 4.5–5.5 VDC, 8–12 VDC |
| Current Consumption | <100 mA | <100 mA |
| Measurement Update Rate | 10 kHz | 10 kHz |
| Operating Temperature | -20 to +85 °C | -20 to +85 °C |
| Thermal Drift Coefficient | <1 ppm | <1 ppm |
| Mass | 2.8 g (Target) 11.8 g (Stator) |
6.5 g (Target) 22.5 g (Stator) |
| Connector | 10‑way Molex PicoClasp | 10‑way Molex PicoClasp |