Incentive™ Software for Industrial Automation
IncentivePLC – PC-Based Control Programming
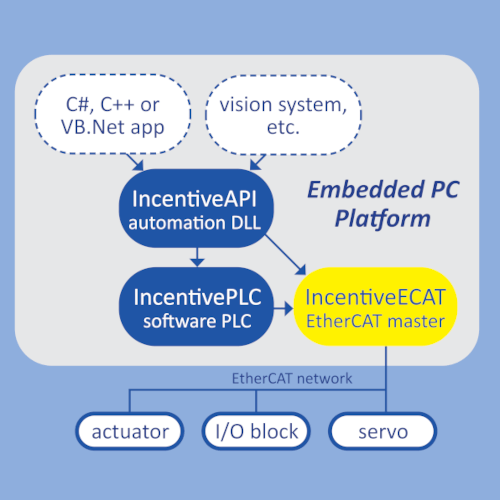
IncentivePLC is a fast, multitasking controller that enables rapid implementation of control programs. It supports advanced constructs and is programmed using QuickBuilder, a graphical programming environment that runs locally or remotely. IncentivePLC is ideal for machine control, process automation, and embedded applications.
IncentiveAPI – High-Level Automation Interface
IncentiveAPI is a powerful software library that allows developers to write automation code in C#, C++, or VB.Net. It provides direct access to IncentivePLC control programs and external devices via IncentiveECAT. The API includes a comprehensive set of objects and methods for motion control, I/O handling, and system diagnostics.
IncentiveECAT – EtherCAT Master Controller
IncentiveECAT is a software-based EtherCAT master that runs on a dedicated core of your multicore PC. It uses a standard Ethernet port to communicate with up to 64 servo axes, motion drives, or I/O modules. When combined with IncentiveAPI, it enables real-time control of physical devices. Add IncentivePLC for a complete PC-based automation solution.
Why Choose Incentive Software?
- Runs on standard Windows PC hardware
- Modular architecture for scalable automation
- Supports C#, C++, VB.Net, and graphical programming
- Real-time EtherCAT communication with up to 64 axes
- Ideal for OEMs, machine builders, and industrial integrators